PolyDataFilters.collision#
- PolyDataFilters.collision(
- other_mesh,
- contact_mode=0,
- box_tolerance=0.001,
- cell_tolerance=0.0,
- n_cells_per_node=2,
- generate_scalars: bool = False,
- progress_bar: bool = False,
Perform collision determination between two polyhedral surfaces.
If
collision_modeis set to all contacts, the output will be lines of contact. Ifcollision_modeis first contact or half contacts then the Contacts output will be vertices.Warning
Currently only triangles are processed. Use
PolyDataFilters.triangulate()to convert any strips or polygons to triangles. Otherwise, the mesh will be converted for you within this method.- Parameters:
- other_mesh
pyvista.DataSet Other mesh to test collision with. If the other mesh is not a surface, its external surface will be extracted and triangulated.
- contact_mode
int, default: 0 Contact mode. One of the following:
0 - All contacts. Find all the contacting cell pairs with two points per collision
1 - First contact. Quickly find the first contact point.
2 - Half contacts. Find all the contacting cell pairs with one point per collision.
- box_tolerance
float, default: 0.001 Oriented bounding box (OBB) tree tolerance in world coordinates.
- cell_tolerance
float, default: 0.0 Cell tolerance (squared value).
- n_cells_per_node
int, default: 2 Number of cells in each OBB.
- generate_scalarsbool, default:
False Flag to visualize the contact cells. If
True, the contacting cells will be colored from red through blue, with collisions first determined colored red. This array is stored as"collision_rgba".Note
This will remove any other cell arrays in the mesh.
- progress_barbool, default:
False Display a progress bar to indicate progress.
- other_mesh
- Returns:
pyvista.PolyDataMesh containing collisions in the
field_dataattribute named"ContactCells". Array only exists when there are collisions.intNumber of collisions.
Notes
Due to the nature of the vtkCollisionDetectionFilter, repeated uses of this method will be slower that using the vtkCollisionDetectionFilter directly. The first update of the filter creates two instances of vtkOBBTree, which can be subsequently updated by modifying the transform or matrix of the input meshes.
This method assumes no transform and is easier to use for single collision tests, but it is recommended to use a combination of
pyvistaandvtkfor rapidly computing repeated collisions. See the Collision Detection ExampleExamples
Compute the collision between a sphere and the back faces of a cube and output the cell indices of the first 10 collisions.
>>> import numpy as np >>> import pyvista as pv >>> mesh_a = pv.Sphere(radius=0.5) >>> mesh_b = pv.Cube(center=(0.5, 0.5, 0.5)).extract_cells([0, 2, 4]) >>> collision, ncol = mesh_a.collision(mesh_b, cell_tolerance=1) >>> collision['ContactCells'][:10] pyvista_ndarray([464, 0, 0, 29, 29, 27, 27, 28, 28, 23])
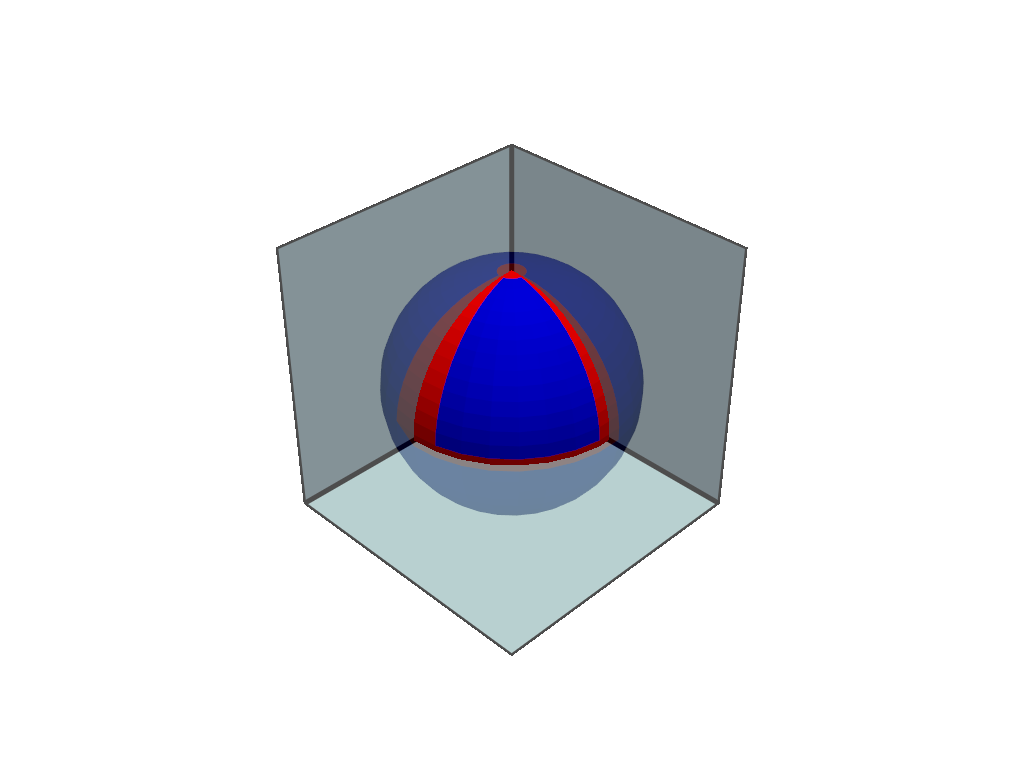
Plot the collisions by creating a collision mask with the
"ContactCells"field data. Cells with a collision are colored red.>>> scalars = np.zeros(collision.n_cells, dtype=bool) >>> scalars[collision.field_data['ContactCells']] = True >>> pl = pv.Plotter() >>> _ = pl.add_mesh( ... collision, ... scalars=scalars, ... show_scalar_bar=False, ... cmap='bwr', ... ) >>> _ = pl.add_mesh( ... mesh_b, ... color='lightblue', ... line_width=5, ... opacity=0.7, ... show_edges=True, ... ) >>> pl.show()
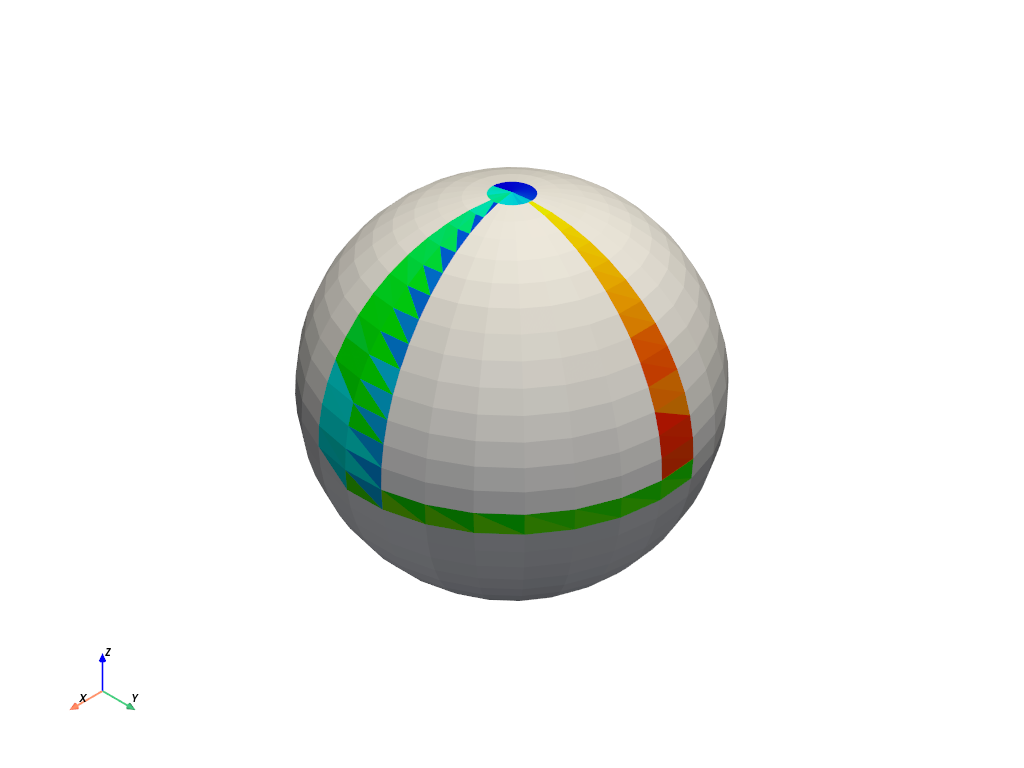
Alternatively, simply plot the collisions using the default
'collision_rgba'array after enablinggenerate_scalars.>>> collision, ncol = mesh_a.collision( ... mesh_b, cell_tolerance=1, generate_scalars=True ... ) >>> collision.plot()
See Collision for more examples using this filter.